Нейроинтерфейсы: прошлое и настоящее
Нейроинтерфейсы или нейрокомпьтерные интерфейсы – это способ или, лучше сказать, подход к объединению человека и машины, когда последняя получает сигнал напрямую из мозга человека. Это звучит фантастически, но суть сводится к обмену сигналами между двумя объектами. Когда один из объектов – это человеческий мозг, задача становится чрезвычайно сложной, но от этого её суть не меняется.
История возникновения
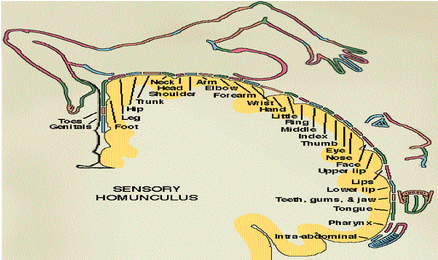
В 1924 году Ганс Бергнер (Hans Berger) с помощью гальванометра зафиксировал активность поверхности мозга. Сейчас эта операция называется электроэнцефалограмма (ЭЭГ). За последующие 16 лет было произведено множество исследований и экспериментов. Систематизировав их, Уайлдер Грейвс Пенфилд (Wilder Graves Penfield) построить функциональные карты головного мозга. На них показывается, какая часть мозга задействована в речевых, а какая – в моторных функциях.
Первым перешёл от теории к практике Хосе Мануэль Родригес Дельгадо (José Manuel Rodríguez Delgado). Он создал миниатюрное устройство, которое вживлял в мозг животных. Оно стимулировало определенные участки мозга, что приводило к уменьшению агрессии животных, но вместе с тем делало их очень пассивными. , он смог остановить бегущего на него быка.

В 1964 году был проведен эксперимент, в котором девушка, концентрируясь, могла включать и выключать лампу.
В это же время Нил Миллер (Neal Miller) научил крыс подавать себе электрическое раздражение в центр удовольствия. Используя это как стимул он научи крыс управлять такими показателями как: сердечный ритм, давление в кровеносных сосудах.
Базовые проблемы нейроинтерфейсов
Основная проблема при создании нейроинтерфесов – это понимание и точная оценка сигналов поступающих от мозга или в мозг.
Для управления необходимо сформировать определенный сигнал, который может различить система. Например, человек думает о единице и представляет её форму. В результате получаются определенные сигналы, которые может уловить автоматика.
Проблема в том, что в зависимости от состояния человека эти сигналы могут в значительной мере отклонятся от тех значений, которые были приняты при записи команды. Например, во время записи вы представляли “1”, а во время команды “I”. В результате выходные функции будут несколько отличатся, и сигнал не будет воспринят.
На сегодня наиболее “читаемые” машиной сигналы – это сигналы связанные с физическими действиями такими, как разгибание или сгибание руки.
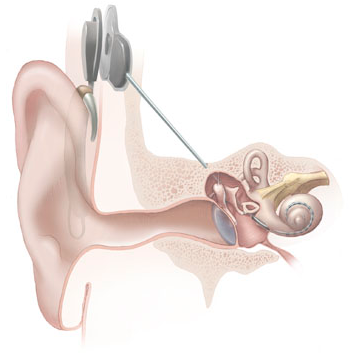
Другое направление – это передача мозгу информации об окружающей среде. В это случае сигнал передается человеческим органам с учетом их методов восприятия информации. Основная сложность заключается в симулировании работы органов человека. Например, преобразование звуков в электрический сигнал для передачи на веточки «ушной улитки».
Нейроинтерфейсы помогают людям
Сегодня существует множество исследовательских проектов, решающих разные проблемы.
«Виртуальная клавиатура» Фарвела и Дончина
Компьютер показывает буквы и снимает показания активности мозга. При этом активная строка мерцает с заданной частотой.

Принцип действия основан на том, что отклик человека на загаданную букву выше, чем у других букв. Однако, скорость такого невысока, средняя скорость равна 7,1 символ в минуту при точности распознания в 80%.
«Искусственный глаз»
Для людей потерявших зрение в результате несчастного случая есть возможность частично вернуть его. Это возможно благодаря установке и подключению камеры к зрительной системе человека. Эта операция комерциализированна и стоит порядка 120 000 $. Однако, изображение, которое увидит человек таким глазом далеко от того, что мы видим. Скорость съемки равна 8 кадрам в секунду.
Управление силой мысли
Мэттью Нейгл (Matthew Nagle) фактически является киборгом. Он парализован, но может силой мысли управлять различными устройствами, курсором на экране, робо-рукой, играть в простые компьютерные игры, например, робо-рукой,благодаря чипу в своей голове.
Будущее нейроинтерфейсов
Есть серьезные проблемы, которые надо решить для полноценной реализации нейроинтерфейсов:
- Нечеткое распознавание сигналов мозга;
- Расшифровка сигналов;
- Создание программ, способных преобразовывать сигналы мозга в команды;
- Этические проблемы.
Для решения проблемы нечеткого распознавания сигналов мозга группа ученых из Калифорнийского университета в Беркли создают «Neural dust». Это миниатюрные роботы, которые будут циркулировать в крови человека и передавать четкие сигналы мозговой активности.
Расшифровка и описание сигналов – это математическая проблема. Необходимо создать математический аппарат, способный предсказывать и описывать выходные сигналы, в зависимости от эмоционального фона, напряжённости и других факторов.
Эта математическая модель необходима для создания программного комплекса, способного воспринимать и обрабатывать сигналы независимо от раздражителей.
Не менее важны вопросы этичности и человеческого восприятия киборгов. Их обсуждали на конференции киборгов в Москве в июле 2015 года.
About the Author
Павел Брызгалов Редактор раздела технологии. Окончил магистратуру МГТУ "СТАНКИН" на кафедре "Робототехника и мехатроника".

-
RoboIvan









