M-Blocks — умные кубики
Инженер Джон Романишин (John Romanishin) из Массачусетского технологического института создал прототип роботов M-Blocks. Эти небольшие роботы в виде кубиков могут находить друг друга и собираться в сложные трехмерные конструкции. Самое удивительное это то, что в них нет внешних элементов, но это не мешает им свободно двигаться, карабкаться и соединяться между собой.
В 2011 году Романишин предложил идею создания таких роботов своему куратору, профессору Даниэл Рус (Daniela Rus). Она сказала, что это просто невозможно. Проекты по созданию самособирающихся роботов уже существовали и не дали положительных результатов. В проекте Molecule, целью которого было создание универсальных роботизированных блоков, но камнем преткновения стали внешние элементы. Их наличие мешало блокам эффективно соединяться. Их пробовали миниатюризировать, делать выдвижными, предлагали концепцию «скользящей самосборки», но это только усложняло конструкцию. Однако сама идея создания универсальных робо-блоков очень интересна и перспективна. По словам самой Даниэл Рус:
[quote]Модульные роботы — это будущее. В отличие от специализированных моделей, они универсальны и могут адаптироваться под любые задачи.[/quote]
Сейчас наибольшего успех в этой области достиг Эрик Швайкард (Eric Schweikardt) из компании Modular Robotics. Но их самосборка — очень сложный процесс, который пока что не обходится без помощи человека.
На его фоне, проект Джона казался просто невыполнимым. Как создать обычный кубик без колес и чего-то подобного, который мог бы двигаться и взаимодействовать с другими объектами? Но решение было найдено, и в итоге роботы M-Blocks двигаются как будто сами по себе.
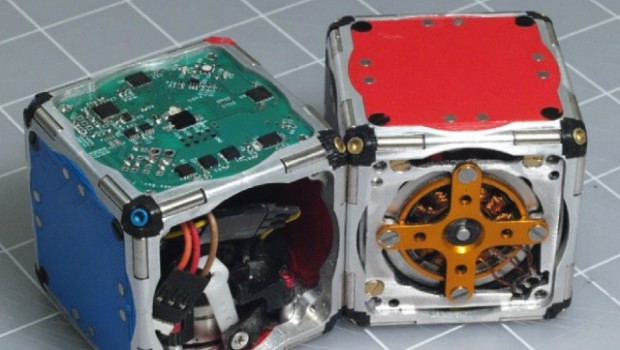
Способ перемещения M-Blocks называется инерционным. Внутри каждого кубике размещён маховик, вращающийся с частотой до 20 000 об/мин. В момент его резкой остановки, энергия вращения направляет куб в сторону вращения маховика.
Соединение кубов друг с другом выполнено на базе магнитов. Они расположены на каждом ребре и стороне куба. Они выполнены на подвижном основании, что позволяет им самостоятельно переориентируются разноимёнными полюсами друг к другу. Поэтому кубы могут соединяться любыми сторонами и гранями. Грани кубов скошены, чтобы было они легко разъединялись.
После представления M-Blocks профессору Даниэл Рус, она признала свою ошибку и заявила:
[quote]Мы просто нуждались во взгляде со стороны и ком-нибудь, кто был бы достаточно страстным, чтобы продолжать разработку несмотря на разочарования.[/quote]
В будущем планируется создание специальных кубов, оснащенных датчиками, источниками питания и другими элементами.

Сейчас основные усилия команды направленны на уменьшение блоков. Они планируют создать микроскопических роботов, способных собираться в объекты макро мира, такие как стулья или шкафы. Такая же идея заложена в клейтронике, так что можно сказать, что M-Blocks это маленький шаг для Джона Романишина и огромный скачек для всего человечества.
Материал написан на основе статьи «Surprisingly simple scheme for self-assembling robots«.
About the Author
Павел Брызгалов Редактор раздела технологии. Окончил магистратуру МГТУ "СТАНКИН" на кафедре "Робототехника и мехатроника".

-
Overleft
-
Pavel Bryzgalov
-









